一次遅れ系とは、ある物理変数y(温度、電圧等)の時間変化が、次の一階線形微分方程式に従う系のことです。
$$\frac{dy}{dt} = -ay + b(t)\quad (a>0)\tag{1}$$
本記事ではこの式の物理的意味について、説明します。
一般的な解釈
(1)式は次のように変形できます。
$$\frac{dy}{dt} = a(\frac{b(t)}{a} – y) \tag{2} $$
下図に示すように、yは単調増加もしくは単調減少関数で、かつ\(\frac{dy}{dt} = 0\)となるのは、\(y = \frac{b(t)}{a}\)であるため、この\(y = \frac{b(t)}{a}\)が最終値(目標値)を意味します。
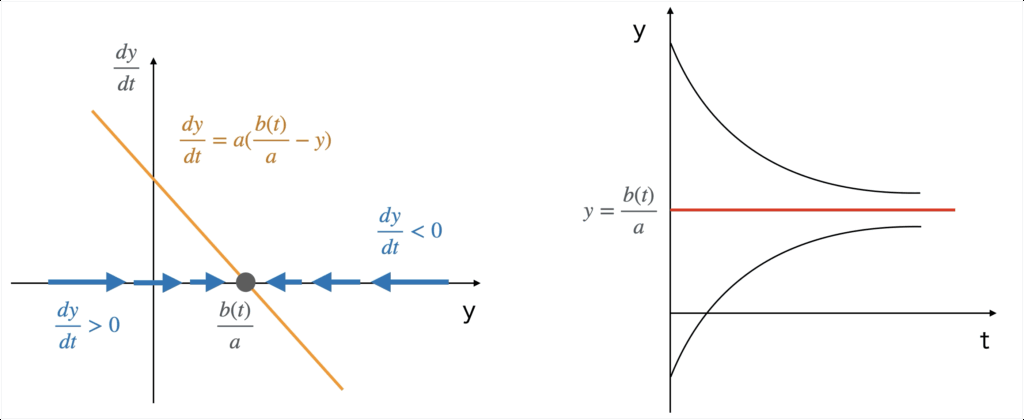
よって、(2)式から目標値と現在値の差分が大きいほど、速く変化するという特性がわかります。
ここで、次のように変数を置き換えます。
$$\tau = \frac{1}{a} \\
Ku(t) = \frac{b(t)}{a}
$$
- \(\tau\):時定数 (s)
- Ku(t):目標値
- u(t):入力値
- K:目標値を入力値の何倍にするか
すると、(2)式は次のようになります。
$$\tau\frac{dy}{dt} = Ku(t) – y \tag{3}$$
数学的な一階微分方程式から、一般的によく見る物理の一次遅れの式に変形できました。
もう一つの解釈
目標値と現在値の差分で表すのが一般的な解釈ですが、駆動力 – 抵抗 という解釈も可能です。
「電車に乗り込む速さ」を例に説明します。
混んだ電車に毎日乗って通勤する人にとって、一次遅れ現象は身近なものでしょう。この例では、電車のドアーが‘抵抗’で車室が‘容量’になる一次遅れ要素と考えられます。
ホームに待っている人々の力で、前に待っている人々はかなりの力で車内に押し込まれ、勢いよく詰め込まれ始めます。しかし、乗客が入れば入るほど後ろの乗客に背圧をおよぼすので、乗り込む速度が遅くなります。
乗車人数が増えるにつれて乗車速度が下がるので、この現象を微分方程式で表すと、次のようになります。
$$\frac{dN}{dt} = f – kN $$
N: 乗車人数、f:抵抗がない場合の乗車速度(人/s)、k:正の定数
これは駆動力 – 抵抗の形で表現される一次遅れの式になります。
また、先ほど示したようにこの式を目標値 – 現在値の形に変形することも可能です。
$$\frac{dN}{dt} = f – kN = k(\frac{f}{k} – N) = \frac{1}{\tau}(a – N)$$
\(\tau\):時定数、a:最大乗車人数
最後に
一次遅れ系は、数学的には単に一階線形微分方程式に従う物理現象ですが、二つの物理的解釈があることを説明しました。
制御工学ではラプラス変換された形で議論することがほとんどだと思いますが、本質を微分方程式から理解しておくことも重要だと思います。




コメント